
クリエイティブコーディングのためのステッピングモータドライバ
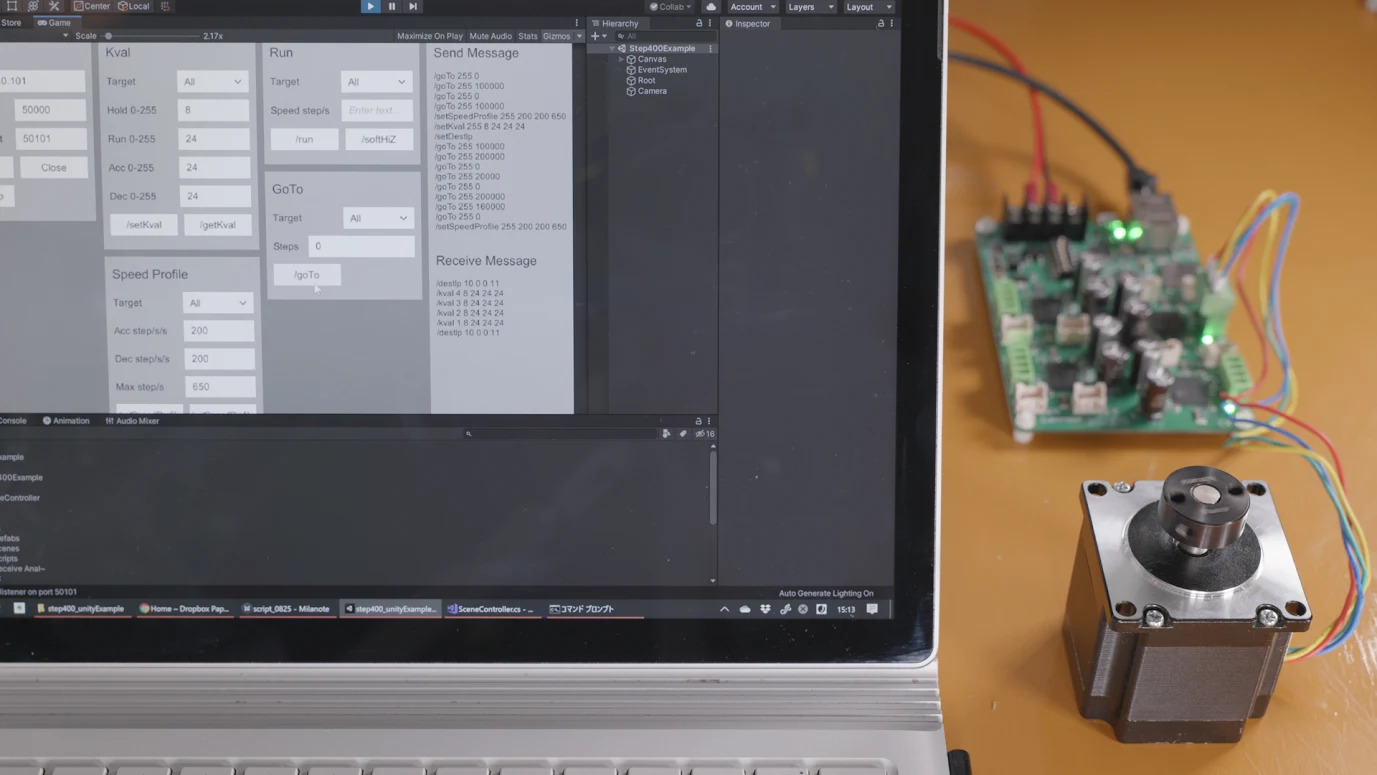
STEP400は4軸制御が可能なステッピングモータドライバ基板です。STEP400は1枚の基板に通信から制御まで必要な機能をシンプルに完結させているほか、通信には産業用の特殊な規格ではなく一般的なイーサネットを用いたOpen Sound Control (OSC) を採用することによって、アートやデザインといった表現用途での使用に十分な信頼性を確保しつつ、使いやすさを実現しています。openFrameworks, Processing, Max, Unity, Touch Designer といったクリエイティブコーディング環境から容易に制御することができます。
姉妹機であるSTEP800との違いについては、こちらのUpdateを参照してください。
プロジェクトの現場から生まれたモータドライバ
STEP400はこれまで私たちが関わってきたたくさんの現場を通して生まれてきました。
当初はDIY向けのモジュールを組み合わせたシステムを使っていましたが、徐々に規模が大きくなるにつれ配線がカオス状態になり、予期しない接触不良や通信の不安定性に苦しめられました。
いくつかの苦しい現場を通して、必要なものを1枚の基板にシンプルに完結させたドライバを作る必要があると考えるようになりました。STEP400のプロトタイプは私たち自身の必要性から生まれ、実際の現場で繰り返し検証を行ってきました。大小さまざまなプロジェクトでの使用実績があります。


Open Sound Control (OSC) について
通常ステッピングモータの制御には産業用イーサネットが使われますが、通常のネットワーク機器と互換性がなかったり、規格がオープンでなかったりと、工場の自動化以外の目的に使おうとすると大変手間がかかります。STEP400では、音楽やアート、デザインの分野のプログラムでよく使われるシンプルで使いやすいOSCプロトコルを採用することで、表現用途に特化したステッピングモータドライバです。
STEP400はArduino互換ですので、通信方式を含めファームウェアを自由に書き換えることもできます。
OSCを用いた制御の実例についてはこちらのUpdateを参照してください。
特徴
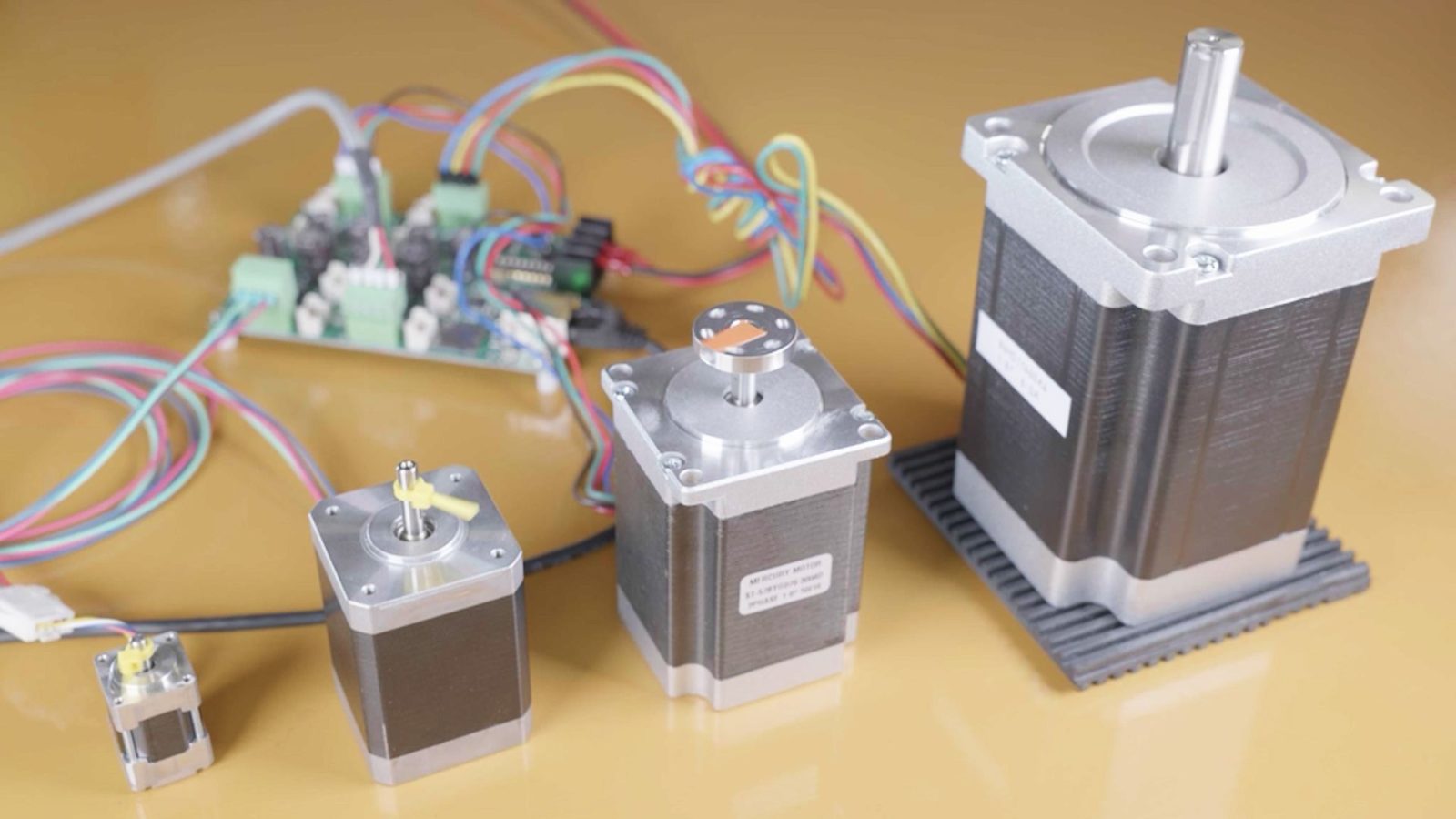
- 1枚のSTEP400で小さいものから大きいものまで、モータ4つを個別に制御できます。
- 静かで滑らかな動きの電圧モードと、高トルクで高回転が可能な電流モードの二つの制御モードがあります。

- Ethernet経由で制御するため、システムを容易にスケールアップできます。


- STEP400のファームウェアはArduinoで書かれていて、ファームウェア、ハードウェアともオープンソースです。
オプション
電磁ブレーキ用基板
STEP400と簡単に接続できる、電磁ブレーキ付きステッピングモータのための制御基板を準備しています。電磁ブレーキは通電時のみロックが解除される構造になっていて、システム終了時や不意の電源断の際に安全に負荷を保持することができます。モータの保持力が無くなるとワークや展示物が落下してしまうような場合に必要です。この基板を使用するには、電磁ブレーキ付きモータが必要です。
センサ用ケーブル
原点センサやリミットセンサのコネクタはJSTのXAタイプです。このコネクタは
- 入手性が良い
- 脱着がしやすい
- ケーブル用の延長コネクタもある
などの特徴があり使いやすいのですが、ケーブル側は端子を圧着する必要があります。端子の圧着にはちょっとした経験と工具が必要で、小規模なプロジェクトではハードルが高いかもしれません。そのため、ケーブルの片方にコネクタを圧着したケーブルを準備しています。ケーブルのもう片方は切り落としになっていて、任意のセンサやスイッチをはんだ付けして使うことができます。
ドキュメント
ファームウェア、設定ツール、ハードウェアの設計ファイルはこちらのGithubリポジトリをご参照下さい。
https://github.com/ponoor/STEP400
仕様
| 駆動可能なモータ | バイポーラ型ステッピングモータ |
| 軸数 | 4 |
| 入力電圧 | 12V-72V |
| 最大印加電源電圧(絶対最大定格) | 80V |
| 最大相電流 | 5A/相 |
| 基板サイズ | 120mm x 84mm 厚さ約21mm(突起部を含む) |
| 重量 | 約80g |
| 付属品 | モータ用4ピンコネクタ x4 |
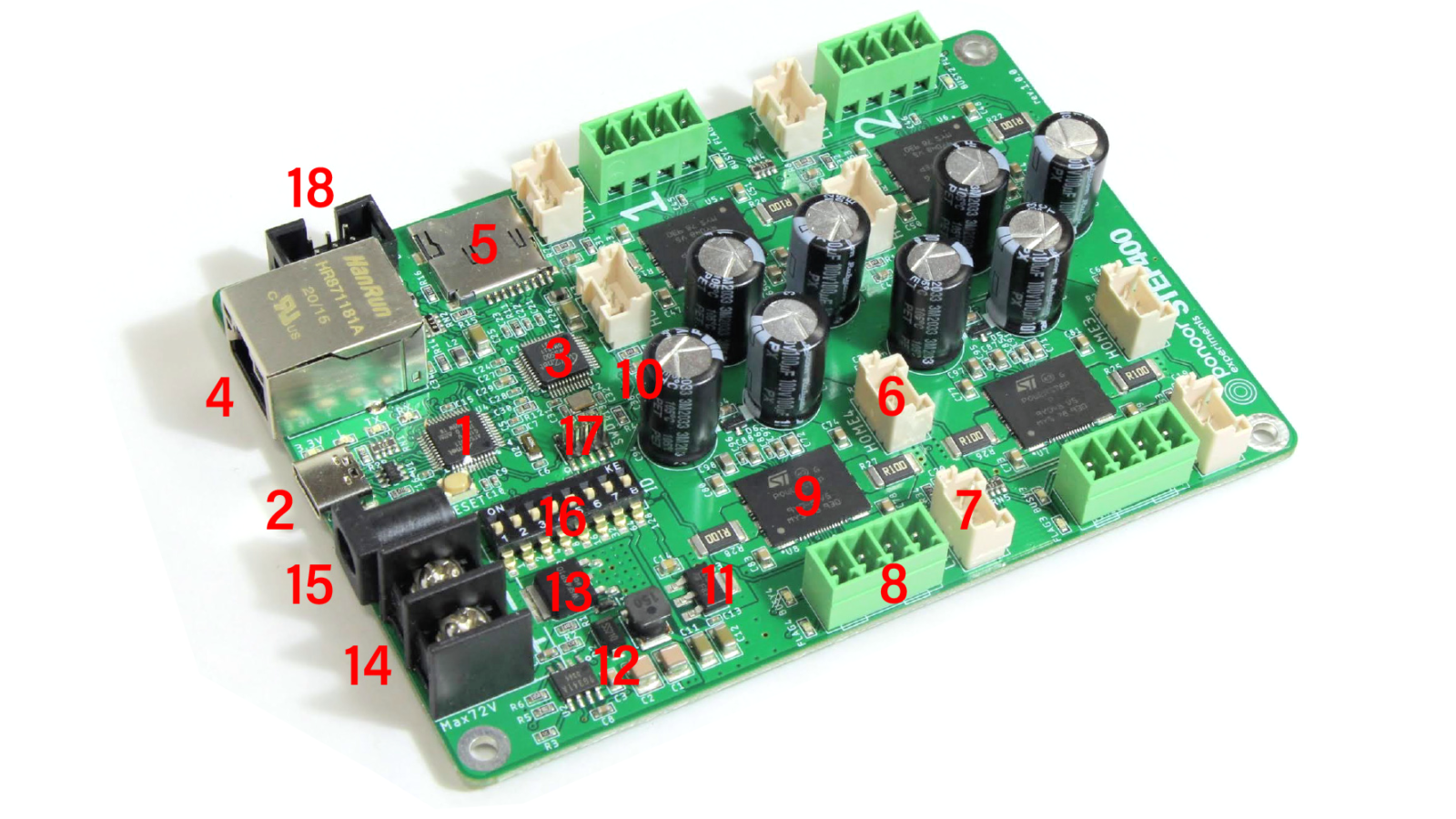
| 番号 | 説明 |
| 1 | MCU, Microchip ATSAMD21G18A |
| 2 | USB type-C. MCUとの通信用 |
| 3 | イーサネットコントローラIC, Wiznet W5500 |
| 4 | Ethernet端子 |
| 5 | microSDカードスロット. JSONの設定ファイルの読み込みに使用します。 |
| 6 | HOMEセンサ用端子. JST XA (B03B-XASK-1) |
| 7 | LIMITセンサ用端子. JST XA (B03B-XASK-1) |
| 8 | モータ接続用コネクタ, 3.81mmピッチユーロスタイル・ターミナルブロック |
| 9 | ステッピングモータドライバIC, STMicroelectronics PowerSTEP01 |
| 10 | モータ動作クロック同期用16MHz水晶発振器 |
| 11 | 5V to 3.3V LDO |
| 12 | DC-DCコンバータ, ROHM BD9G341AEFJ |
| 13 | 逆接防止保護用P-MOSFET |
| 14 | 電源入力用ねじ式ターミナル, M3x2, 72Vまで |
| 15 | 電源入力用DCジャック, 5.5mm/2.1mm/24Vまで |
| 16 | ID設定用DIPスイッチ |
| 17 | MCUプログラム用SWD端子 |
| 18 | 電磁ブレーキ基板/GPIO用ボックスヘッダ |
ご購入
以下の場所で購入できます。10枚以上ご購入の場合は弊社まで直接お問い合わせください。
- スイッチサイエンス (日本から発送)
- Crowd Supply (アメリカ合衆国から発送)
- Mouser (アメリカ合衆国から発送)
関連するUpdates
#01 ステッピングモータの便利な点
#02 【映像】プログラミング環境やアプリケーションから動かした例
#03 機構部品の第一歩
#04 産業用ドライバ vs STEP400
STMのPowerSTEP01シールドを使う