使い方
使い方
基本的にはSTEP400/800と同じように制御できますので、STEP400/800のチュートリアルや、コマンドリファレンスを参照してください。
STEP100はSTEP400のコマンドが、STEP200ではSTEP800のコマンドが使用できますが、モータの軸数が異なるので、MotorIDの範囲は以下の通りに変わります。
| Model | 対応する機種 | MotorIDの範囲 |
|---|---|---|
| STEP100 | STEP400 | 1, 255 |
| STEP200 | STEP800 | 1-2, 255 |
チュートリアル用のサンプルファイルもMotorIDの範囲の違い以外は同様に使えます。
しかし異なっている点もいろいろとありますので、次に異なる項目ごとに説明します。
起動
X-Nucleoボードへモータ電源を供給しても、Arduino側へは電源が供給されませんので、別途ArduinoボードのDCジャックやUSBなどから別途電源を供給する必要があります。 そのため、モータ電源をArduinoの後に入れると、Arduinoが起動時に送ったコマンドがモータドライバで受信されず、初期化に失敗してしまいます。とはいえ、逆にArduinoの電源が入っていない状態でモータドライバ側に電源を供給すると、Arduinoのピンの状態が不確定な状態のままになり、何か予期しない動作が起こる可能性も考えられます。 またW5100を使った旧式のEthernetシールドでは、起動時のリセットに失敗する現象が頻繁にみられます。 これらのことを考えると、確実な起動方法は以下です。
- Arduino電源を供給する
- モータ電源を供給する
- ArduinoまたはEthernetシールドののリセットボタンを押して全体を再起動する
※STEP400/800ではモータ電源を供給すれば、確実にArduino部もEthernetシールドにあたる部分も起動するようになっています。
SDカード
EthernetシールドにはSDカードスロットがついているものが多くあり、それを使えばconfigToolを用いた初期設定も可能です。ただし現状ではSTEP100/200に対応した設定書き出しツールは準備できていないため、STEP100はSTEP400のconfigファイルを、STEP200はSTEP800のconfigファイルを利用してください。 STEP100/200で制御可能なモータ数を超えた設定データや、LIMITスイッチ関連の設定などは無視されます。
DIPスイッチ
STEP100/200のファームウェアでは、IDを強制的に1に設定しています。複数台をネットワークに接続したい場合は、基板ごとにIDを書き換える必要があります。
boardsDef.hに各基板ごとの定義があり、その中にある#define ID 1の部分の数値を書き換えてコンパイルしてください。
あるいはX-Nucleoボードのさらに上にシールドを差し込んで、自前でDIPスイッチをはんだ付けして取り付ける方法が考えられます。この場合はファームウェアのカスタムが必要です。例えば4桁のDIPスイッチをA1,A3,A4,A5ピンに接続した場合、boardsDef.h で、対応するボード定義に以下のコードを追加します。
#define HAVE_DIP_SW
#define DIP_SW_DIGITS 4
const uint8_t dipSwPin[DIP_SW_DIGITS] = { A1, A3, A4, A5 };HOMEセンサ
STEP400/800ではHOMEセンサ用の端子はモータドライバICのSWピンから引き出されています。STEP100/200でも同様に、X-Nucleo上に引き出されているSWピンへセンサを接続します。このピンはプルアップされているので、センサやスイッチが反応したらGNDに接続されるようにします。
STEP100 (X-NUCLEO-IHM03A1)
X-NUCLEO-IHM03A1上のTP1とラベリングされている、赤色のテストピンがSWピンです。この端子に直接はんだ付けして配線を取り出す必要があります。
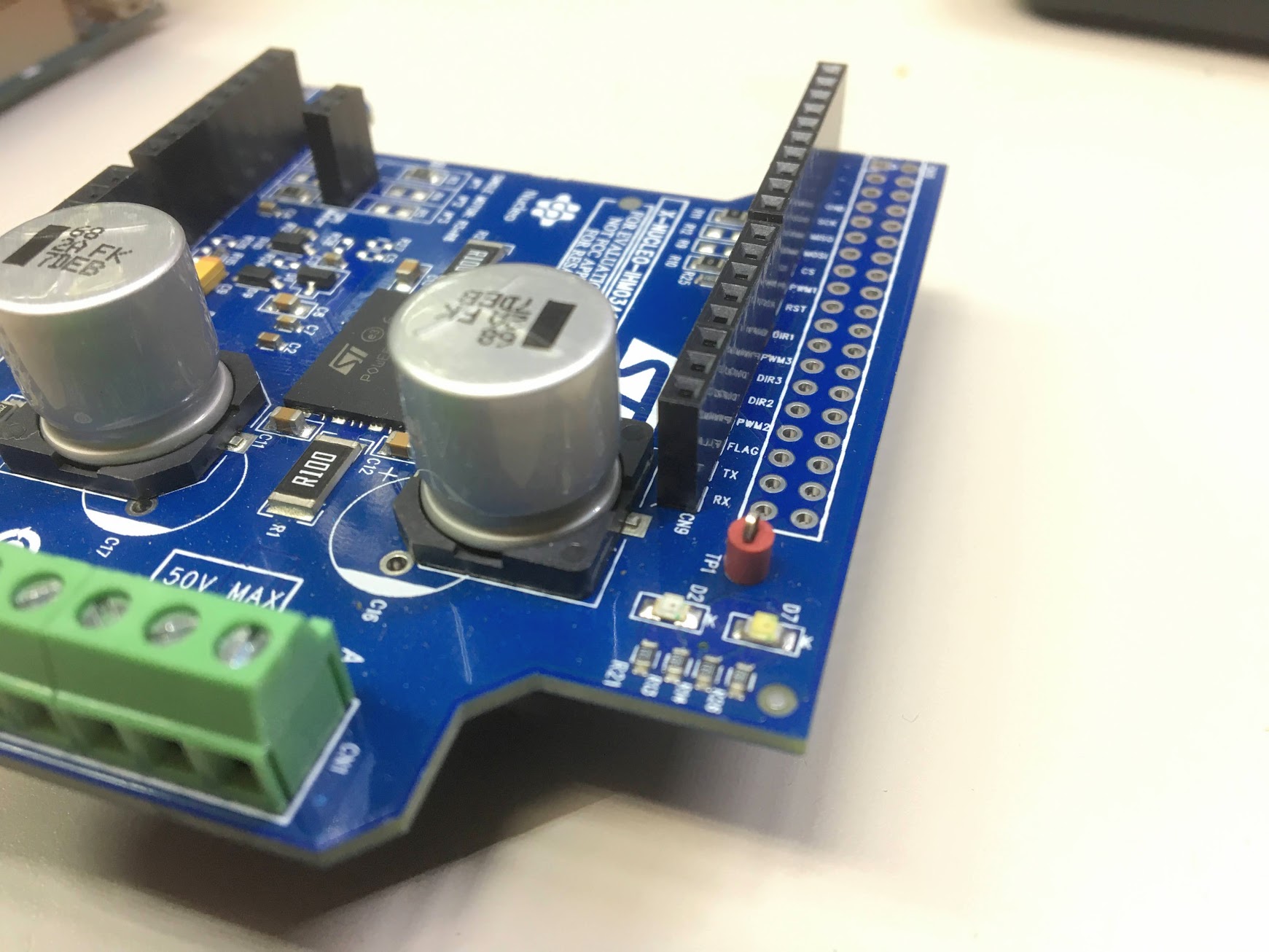
ここにセンサからのケーブルを直接つけてしまうと不便なので、途中にコネクタを入れたほうがいいかもしれません。
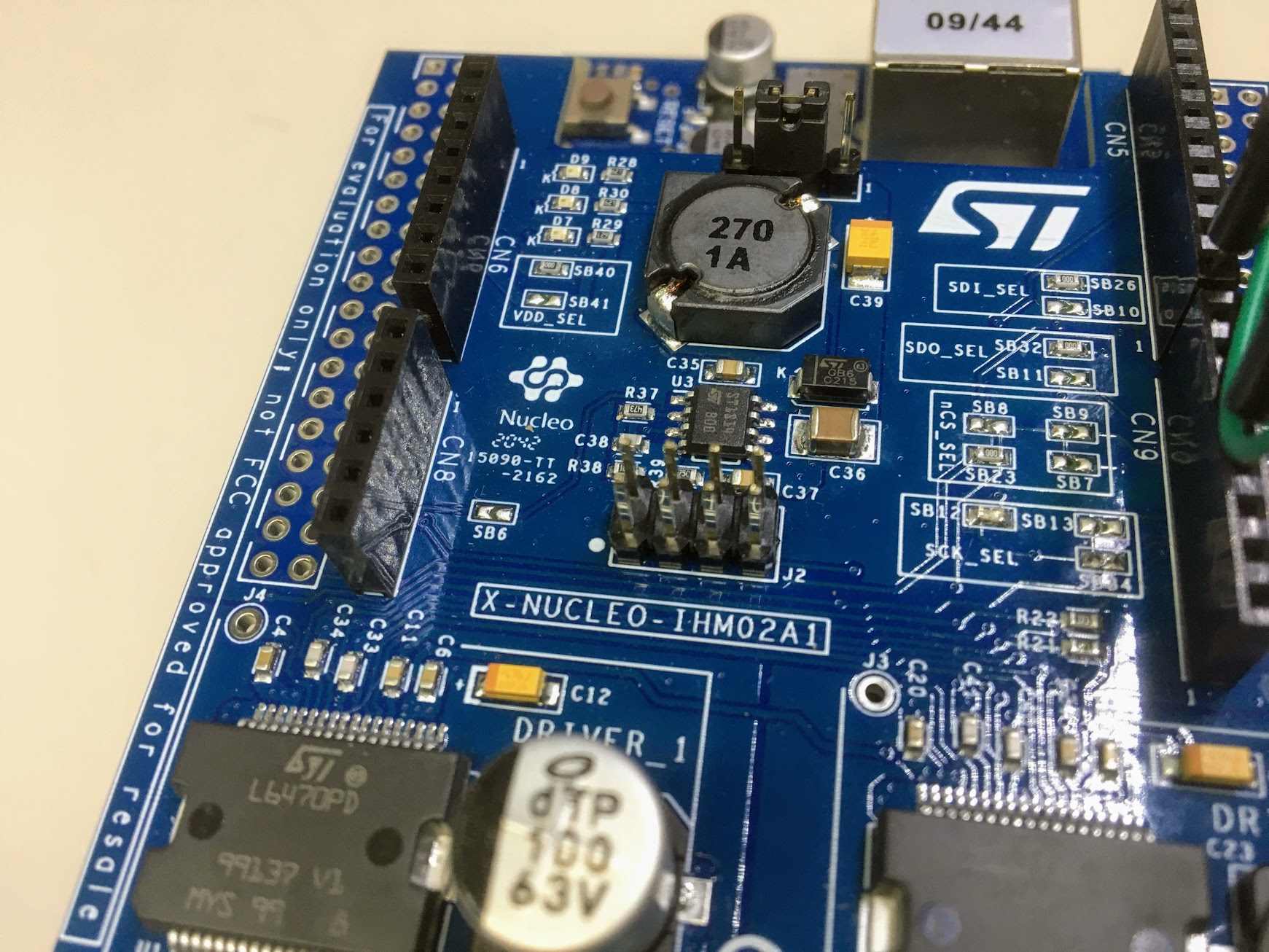
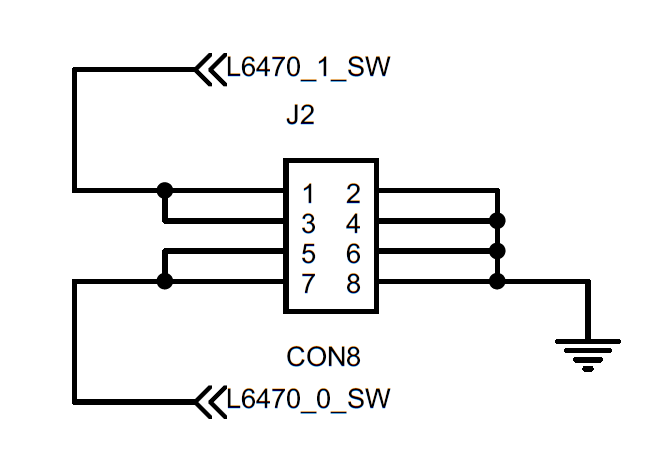
STEP200 (X-NUCLEO-IHM02A1)
IHM02A1ではJ2コネクタがSW端子です。基板上の白丸(●)が回路図での1番ピンを表しています。
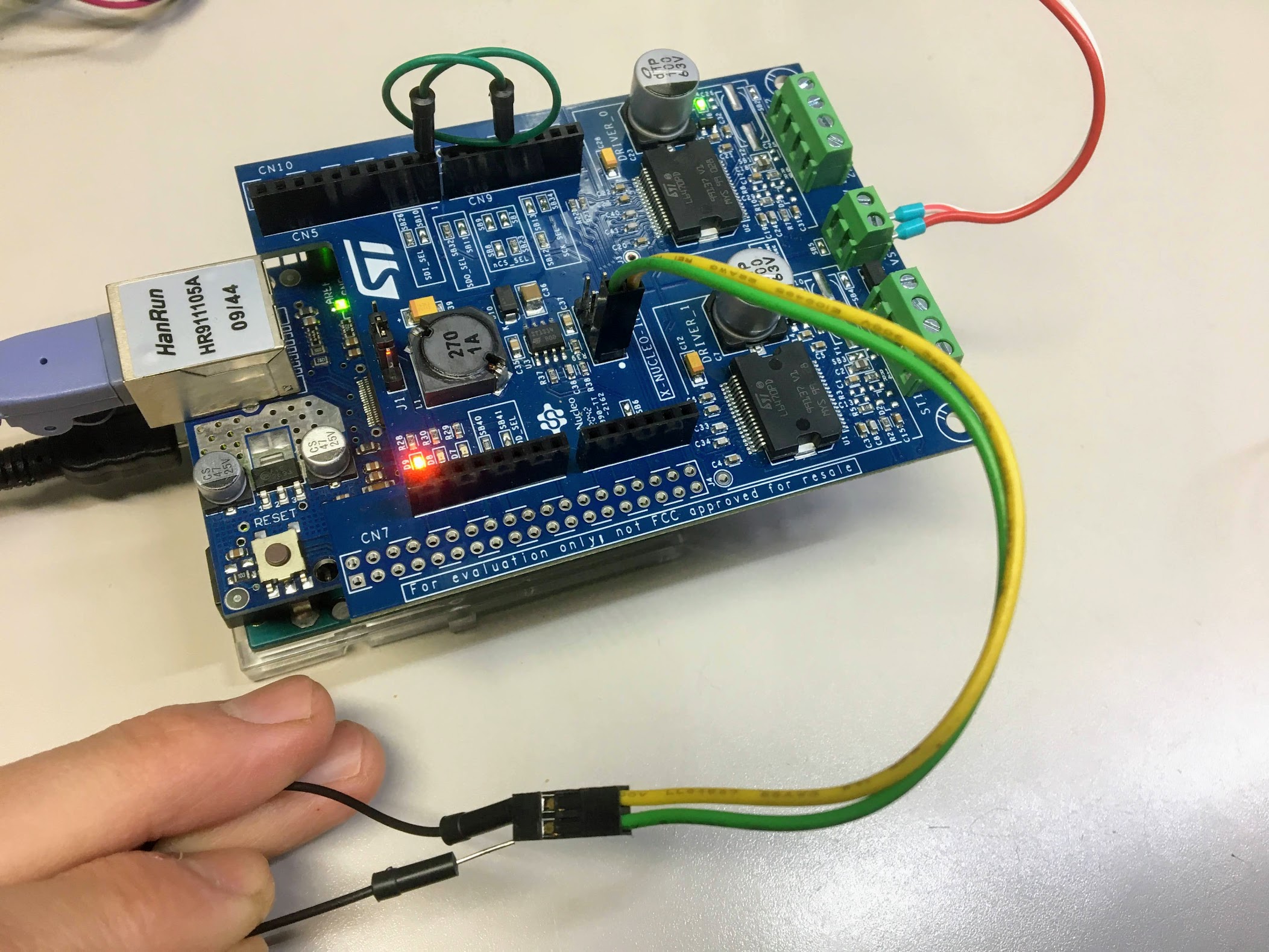
例えば1番目のドライバのSW端子に接続する場合はこのような感じです。スイッチの変わりにジャンプワイヤーで動作をテストしています。
LIMITセンサ
STEP100/200ではLIMITセンサ端子は定義していませんが、Arduinoの余っているピンをLIMITセンサとして利用することも可能です。この場合はファームウェアのカスタムが必要です。boardsDef.hにある各ボードの定義を編集します。
例えば以下のような定義を追加すると D6, D7 にLIMITセンサ端子の役割を割り振ることができます。
#define HAVE_LIMIT_GPIO
// STEP100の場合
const uint8_t limitSwPin[1] = { 6 };
// STEP200の場合
const uint8_t limitSwPin[2] = { 6,7 };